Jinwang Wang received the Ph.D. degree in Signal Processing Lab (SPL) at Wuhan University (WHU), advised by Prof. Wen Yang.
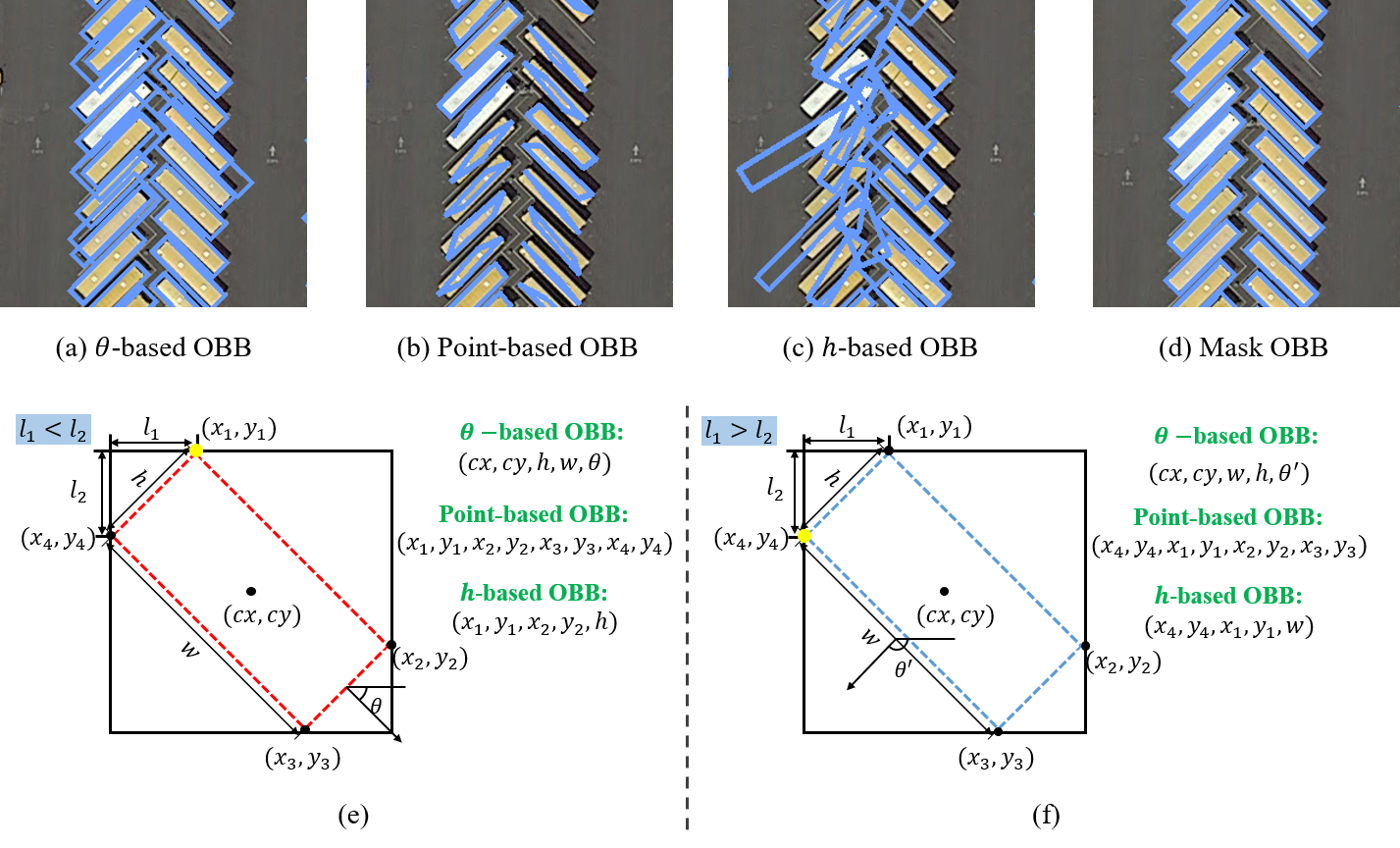
My research is on Computer Vision and Deep Learning. Particularly I am interested in object detection, localization and recognition based on aerial images (UAVs or satellites).